- Menyelesaikan tugas besasr mengenai pengembangan sistem kontrol garasi otomatis dari Bapak Dr. Ir. Darwison, ST, MT
- Mengetahui dan memahami penggunaan sensor infrared, LDR dan PIR dalam pengaplikasian pengembangan sistem kontrol garasi otomatis
- Mampu membuat rangkaian dari materi yang diberikan


Catu daya atau power supply adalah perangkat keras (hardware) yang berfungsi sebagai sumber listrik bagi alat lain. Jadi power supply ini berfungsi untuk menyuplai daya listrik untuk berbagai peralatan elektronik.Berbagai peralatan elektronik yang biasa menggunakan power supply diantaranya seperti komputer, radio, laptop, TV dan lainnya. Beberapa contoh tersebut merupakan jenis-jenis perangkat elektronik yang bekerja dengan arus DC.Jadi untuk mendukung kinerjanya, alat tersebut membutuhkan suplai daya dari perangkat lain. Salah satu yang dapat digunakan untuk kebutuhan tersebut adalah power supply ini.

mengecek status logika (High atau Low) yang keluar dari rangkaian digital. Objek yang diukur
oleh logic probe ini adalah tegangan oleh karena itu biasanya rangkaian logic probe harus
menggunakan tegangan luar (bukan dari rangkaian logika yang ingin diukur) seperti baterai. Alat
ini biasa digunakan pada IC TTL ataupun CMOS (Complementary metal-oxide semiconductor).
Logic probe menggunakan dua lampu indikator led yang berbeda warna untuk membedakan
keluaran High atau Low. Yang umum dipakai yaitu LED warna merah untuk menandakan output
berlogika HIGH (1) dan warna hijau untuk menandakan output berlogika LOW(0).
Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Summary:
Microcontroller ATmega328
Operasi dengan daya 5V Voltage
Input Tegangan (disarankan) 7-12V
Input Tegangan (batas) 6-20V
Digital I / O Pins 14 (dimana 6 memberikan output PWM)
Analog Input Pin 6
DC Lancar per I / O Pin 40 mA
Saat 3.3V Pin 50 mA DC
Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed ?16 MHz

2. Sumber DC
Sumber arus listrik DC kependekan dari Direct Current, dikenal dengan arus searah karena merupakan sumber arus yang dihasilkan hanya memiliki satu polaritas. Dikatakan satu polaritas karena arus yang mengalir tetap dalam satu arah yaitu dari positif ke negatif atau dari negatif ke positif. Arus listriD AC akan membentuk suatu gelombang yang dinamakan dengan gelombang sinus atau lebih lengkapnya sinusoida dengan hanya membentuk setengah gelombang. Disini menggunakan sumber DC baterai kotak dengan kapasitas 9 Volt
3. Resistor




Grafik sensor infrared
Spesifikasi dari Sensor Infrared :
· 5VDC Tegangan operasi
· Pin I / O memenuhi standar 5V dan 3.3V
· Rentang: Hingga 20cm
· Rentang penginderaan yang dapat disesuaikan
· Sensor Cahaya Sekitar bawaan
· Arus suplai 20mA
· Lubang pemasangan
Konfigurasi Sensor Infrared :

|

.jpg)


Radius : 180 derajat
Jarak deteksi : 5 - 7 meter
Output : Digital TTL





Sensor Magnetik yang terbuat dari bahan semikonduktor ini merupakan komponen populer pilihan para perancang elektronika untuk aplikasi-aplikasi non-contact mereka karena kehandalannya dan mudah dirawat. Sensor Efek Hall juga tahan terhadap air, debu dan getaran apabila dibungkus dengan pelindung yang benar.
Salah satu penggunaan Hall Effect Sensor ini adalah pada produk otomotif seperti mendeteksi posisi jok mobil, sensor sabuk pengaman, indikator minyak dan kecepatan roda untuk sistem pengereman ABS (Anti-Lock Braking System). Selain pada produk otomotif, Hall Effect Sensor ini juga dapat kita temukan di produk Smartphone (ponsel pintar) yang memiliki fitur deteksi Cover atau Penutup ponsel.
Sensor Efek Hall ini merupakan perangkat atau komponen yang diaktifkan oleh medan magnet eksternal. Seperti yang kita ketahui bahwa medan magnet memiliki dua karakteristik penting yaitu densitas flux (flux density) dan Kutub (kutub selatan dan kutub utara). Sinyal masukan (Input) dari Sensor Efek Hall ini adalah densitas medan magnet disekitar sensor tersebut, apabila densitas medan magnet melebihi batas ambang yang ditentukan maka sensor akan mendeteksi dan menghasilkan tegangan keluaran (output) yang disebut dengan Tegangan Hall (VH).
- Arduino

- Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
- RESISTOR

Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkaian elektronika. Satuan atau nilai resistansi suatu resistor disebut Ohm dilambangkan dengan simbol Omega (Ω).
Simbol Resistor :

Cara Menentukan Nilai Resistor :
· Dengan Kode Warna :
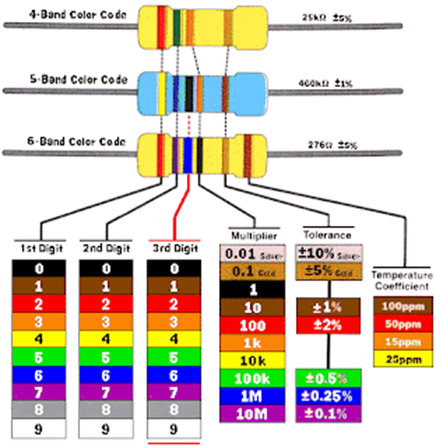
· Resistor dengan 4 cincin kode warna
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
· Resistor dengan 5 cincin kode warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
· Resistor dengan 6 cincin warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
· Dengan Kode Huruf Resistor

Kode Huruf Untuk Nilai Resistansi :
o R, berarti x1 (Ohm)
o K, berarti x1000 (KOhm)
o M, berarti x 1000000 (MOhm)
Kode Huruf Untuk Nilai Toleransi :
o F, untuk toleransi 1%
o G, untuk toleransi 2%J, untuk toleransi 5%
o K, untuk toleransi 10%
o M, untuk toleransi 20%
Rumus Menentukan Nilai Resitor :
o Resistor Seri R(total) = R1+R2+ R(selanjut nya).
o Resistor Paralel R(total) = 1/R(total) = 1/R1 + 1/R2 + 1/R(seterusnya).
- SENSOR INRARED
- Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat (amplifier).
- Bentuk dan Konfigurasi Pin IR Detector Photomodules TSOP.
 |
| Gambar 7. Sensor Infrared |
- Konfigurasi pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules ) memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip, keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP) akan berlogika 1.
 |
| Grafik 1. |
- Dari grafik dapat disimpilkan bahwa semakin jauh jarak benda maka semakin kecil output nya, dan begitu juga sebaliknya.
 |
| Grafik 2. |
- Dari grafik dapat disimpulkan bahwa semakin tinggi intensitass cahaya maka semakin rendah nilai resistansi dan sebaliknya.
 | |||||||
Bagain sensor infrared
Nilai resistansi LDR sangat dipengaruhi oleh intensitas cahaya. Semakin banyak cahaya yang mengenainya, maka semakin menurun nilai resitansinya. Sebaliknya, jika cahaya yang mengenainya sedikit (gelap), maka nilai hambatannya menjadi semakin besar, sehingga arus listrik yang mengalir akan terhambat.
Adapun spesifikasi atau karakteristrik umum dari sensor cahaya LDR adalah sebagai berikut :
merupakan sebuah sensor berbasiskan infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda yang terdeteksi olehnya. Benda yang bisa dideteksi oleh sensor ini biasanya adalah tubuh manusia.
Sensor PIR ini bekerja dengan menangkap energi panas yang dihasilkan dari pancaran sinar inframerah pasif yang dimiliki setiap benda dengan suhu benda diatas nol mutlak. Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 32 derajat celcius, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik. Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar inframerah pasif ini membawa energi panas. Prosesnya hampir sama seperti arus listrik yangterbentuk ketika sinar matahari mengenai solar cell. Cara kerja pembacaan sensor PIR Pancaran infra merah masuk melalui lensa Fresnel dan mengenai sensor pyroelektrik, karena sinar infra merah mengandung energi panas maka sensor pyroelektrik akan menghasilkan arus listrik. Sensor pyroelektrik terbuat dari bahan galium nitrida (GaN), cesium nitrat (CsNo3) dan litium tantalate (LiTaO3). Arus listrik inilah yang akan menimbulkan tegangan dan dibaca secara analog oleh sensor. Kemudian sinyal ini akan dikuatkan oleh penguat dan dibandingkan oleh komparator dengan tegangan referensi tertentu (keluaran berupa sinyal 1-bit). Jadi sensor PIR hanya akan mengeluarkan logika 0 dan 1, 0 saat sensor tidak mendeteksi adanya pancaran infra merah dan 1 saat sensor mendeteksi infra merah. Sensor PIR didesain dan dirancang hanya mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer. Diluar panjang gelombang tersebut sensor tidak akan mendeteksinya. Untuk manusia sendiri memiliki suhu badan yang dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10 mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat terdeteksi oleh sensor PIR. (Secara umum sensor PIR memang dirancang untuk mendeteksi manusia). |



2. Susun rangkaian sesuai panduan
3. Input codingan arduino
4. Hidupkan rangkaian
5. Apabila tidak terjadi eror, maka rangkaian selesai dibuat.
.png)


- Kondisi OFF = IR tidak mendeteksi mobil, pintu garasi tertutup
- Kondidi ON = IR mendeteksi adanya mobil, pintu garasi terbuk
- Kondisi OFF = LDR mendeteksi tidak cukupnya intensitas cahaya, sehingga lampu di dalam garasi hidup
- Kondisi ON = LDR mendeteksi intensitas cahaya yang cukup, sehingga lampu di dalam garasi mati
- Kondisi OFF = PIR tidak mendeteksi adanya pergerakan didepan garasi, sehingga lampu pengaman dan alaram mati
- Kondisi ON = PIR mendeteksi adanya gerakan mencurigakan didepan garasi, sehingga lampu pengaman dan alaram hidup
- Kondisi switch ON = sistem dapat berjalan sesuai kondisi diatas (ON /OFF)
- Kondisi switch OFF = sistem OFF sampai switch di triger ke mode ON
- Download rangkaian koding UNO [DOWNLOAD]
- Download rangkaian Visual studio [DOWNLOAD]
- Download HMTL [DOWNLOAD]
- Download library Arduino [DOWNLOAD]
- Download library Infrared (IR) [DOWNLOAD]
- Download library PIR [DOWNLOAD]
- Download library LDR [DOWNLOAD]
- Download library FLAME [DOWNLOAD]
- Download library Magnetic Hall [DOWNLOAD]
- Download listing program [DOWNLOAD]
- Download datasheet Switch [DOWNLOAD]
- Download datasheet Arduino UNO R3 [DOWNLOAD]
- Download datasheet Infrared (IR) [DOWNLOAD]
- Download datasheet LM35 [DOWNLOAD]
- Download datasheet LDR [DOWNLOAD]
- Download datasheet PIR [DOWNLOAD]
- Download datasheet Magnetic Hall [DOWNLOAD]


Tidak ada komentar:
Posting Komentar